SISTEMAS SCADA
SCADA viene de las siglas de "Supervisory Control And Data Adquisition", es decir: adquisición de datos y control de supervisión. Se trata de una aplicación software especialmente diseñada para funcionar sobre ordenadores en el control de producción, proporcionando comunicación con los dispositivos de campo (controladores autónomos, autómatas programables, etc.) y controlando el proceso de forma automática desde la pantalla del ordenador. Además, provee de toda la información que se genera en el proceso productivo a diversos usuarios, tanto del mismo nivel como de otros supervisores dentro de la empresa: control de calidad, supervisión, mantenimiento, etc.
En este tipo de sistemas usualmente existe un ordenador, que efectúa tareas de supervisión y gestión de alarmas, así como tratamiento de datos y control de procesos. La comunicación se realiza mediante buses especiales o redes LAN. Todo esto se ejecuta normalmente en tiempo real, y están diseñados para dar al operador de planta la posibilidad de supervisar y controlar dichos procesos.
Los programas necesarios, y en su caso el hardware adicional que se necesite, se denomina en general sistema SCADA.
Prestaciones.
Un paquete SCADA debe estar en disposición de ofrecer las siguientes prestaciones:
Posibilidad de crear paneles de alarma, que exigen la presencia del operador para reconocer una parada o situación de alarma, con registro de incidencias.
Generación de históricos de señal de planta, que pueden ser volcados para su proceso sobre una hoja de cálculo.
Ejecución de programas, que modifican la ley de control, o incluso anular o modificar las tareas asociadas al autómata, bajo ciertas condiciones.
Posibilidad de programación numérica, que permite realizar cálculos aritméticos de elevada resolución sobre la CPU del ordenador.
Con ellas, se pueden desarrollar aplicaciones para ordenadores (tipo PC, por ejemplo), con captura de datos, análisis de señales, presentaciones en pantalla, envío de resultados a disco e impresora, etc.
Además, todas estas acciones se llevan a cabo mediante un paquete de funciones que incluye zonas de programación en un lenguaje de uso general (como C, Pascal, o Basic), lo cual confiere una potencia muy elevada y una gran versatilidad. Algunos SCADA ofrecen librerías de funciones para lenguajes de uso general que permiten personalizar de manera muy amplia la aplicación que desee realizarse con dicho SCADA.
Requisitos.
Un SCADA debe cumplir varios objetivos para que su instalación sea perfectamente aprovechada:
Deben ser sistemas de arquitectura abierta, capaces de crecer o adaptarse según las necesidades cambiantes de la empresa.
Deben comunicarse con total facilidad y de forma transparente al usuario con el equipo de planta y con el resto de la empresa (redes locales y de gestión).
Deben ser programas sencillos de instalar, sin excesivas exigencias de hardware, y fáciles de utilizar, con interfaces amigables con el usuario.
Módulos de un SCADA.
Los módulos o bloques software que permiten las actividades de adquisición, supervisión y control son los siguientes:
Configuración: permite al usuario definir el entorno de trabajo de su SCADA, adaptándolo a la aplicación particular que se desea desarrollar.
Interfaz gráfico del operador: proporciona al operador las funciones de control y supervisión de la planta. El proceso se representa mediante sinópticos gráficos almacenados en el ordenador de proceso y generados desde el editor incorporado en el SCADA o importados desde otra aplicación durante la configuración del paquete.
Módulo de proceso: ejecuta las acciones de mando preprogramadas a partir de los valores actuales de variables leídas.
Gestión y archivo de datos: se encarga del almacenamiento y procesado ordenado de los datos, de forma que otra aplicación o dispositivo pueda tener acceso a ellos.
Comunicaciones: se encarga de la transferencia de información entre la planta y la arquitectura hardware que soporta el SCADA, y entre ésta y el resto de elementos informáticos de gestión.
Wednesday, July 05, 2006
Tuesday, July 04, 2006
MULTIVIBRADORES ASTABLES
CON OPAMP
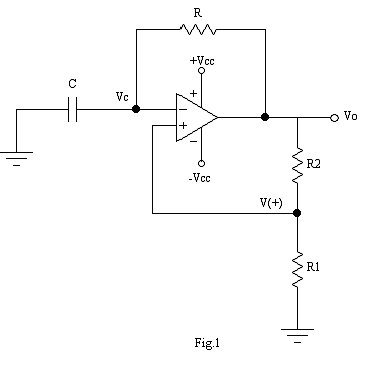
Para obtener un multivibrador astable podemos tomar como base un COMPARADOR CON HISTÉRESIS (SCHMIDT TRIGGER) al cual realimentamos negativamente por medio de una red RC. El circuito se muestra en la fig.1
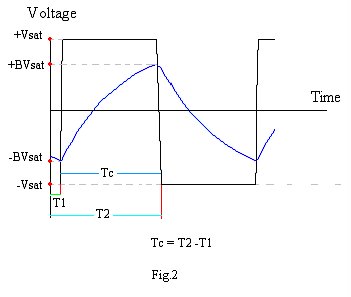
Las formas de onda en el capacitor (Vc) y en la salida ( Vo), se muestran en la fig.2
Funcionamiento del circuito
Como podemos observar Vo (onda cuadrada) varía entre +Vsat y –Vsat. Supongamos que: V(+) > Vc, entonces Vo = +Vsat. Bajo esta condición sucede lo siguiente:
a) C empieza a cargarse a través de R.
b) V(+) = B*(+Vsat) , donde: B= [R1/(R1+R2)]
c) Cuando Vc = V(+), entonces Vo = -Vsat
d) C empieza a descargarse hacia –Vsat
e) V(+) = B*(-Vsat)
f) Sin embargo cuando Vc= V(+), el comparador conmuta nuevamente de regreso a +Vsat y el ciclo se repite indefinidamente.
El periodo de la onda de salida sera la suma de los tiempos de carga y descarga del capacitor, pero como la carga y la descarga se realiza a través del mismo resistor R, entonces los tiempos son iguales. Bastará encontrar el tiempo de carga y multiplicarlo por dos para hallar el periodo de la onda.
De la fig.2 podemos observar que Tc = T2 – T1
Entonces utilizamos la fórmula : Vc = Vmax*[1 – exp.(-t/τ)]
Para t = T2, tenemos : Vc = Vsat + BVsat = Vsat*(1 + B)
Vmax = 2Vsat
τ = RC
Entonces:
Vsat*(1 + B) = 2Vsat*[1 - exp.(-T2/RC)]
exp(-T2/RC) = 1 – [(1+B)/2]
exp(-T2/RC) = (1 – B)/2
exp( T2/RC) = 2/(1 – B)
T2/RC = ln[2/(1-B)]
T2 = RC*[ln2 – ln(1-B)]
Para t = T1 , tenemos : Vc = Vsat – BVsat = Vsat*(1 – B)
Vmax = 2Vsat
τ = RC
Entonces:
Vsat*(1 - B) = 2Vsat*[1 - exp.(-T1/RC)]
exp(-T1/RC) = 1 – [(1-B)/2]
exp(-T1/RC) = (1 + B)/2
exp( T1/RC) = 2/(1 + B)
T1/RC = ln[2/(1+B)]
T1 = RC*[ln2 – ln(1+B)]
Entonces :
Tc = RC*[ln2 – ln(1-B)] - RC*[ln2 – ln(1+B)]
Tc = RC*[ln(1+B) – ln(1-B)]
Por propiedad de logaritmos: lna – lnb = ln(a/b)
Entonces:
Tc = RC*ln[(1+B)/(1-B)]
Como: B= [R1/(R1+R2)], reemplazando y reduciendo tenemos que:
Tc = RC*ln[1+2(R1/R2)]
Como los tiempos de carga y descarga son iguales, entonces :
T = 2RC*ln[1+2(R1/R2)]
Por lo tanto : f = 0,5 / RC*ln[1+2(R1/R2)]
CON BJT
Para entender el funcionamiento de un multivibrador astable con transistores (fig.3) bipolares (los cuales solo trabajan entre el CORTE y la SATURACIÓN), debemos tener presente lo siguiente:
1) los transistores, así como todos los componentes electrónicos no son idénticos entre si a pesar de tener el mismo código de fabricación. En este caso Q1 y Q2 presentan diferentes corrientes de saturación , el que necesite menor corriente de base para saturarse, será el que primero conduzca, definiendo el comportamiento del otro transistor.
2) Los capacitores inician su carga a corriente máxima (se comportan como cortocircuitos) y cuando alcanzan plena carga su corriente se hace cero (circuito abierto). En el caso del circuito de la fig.3, los capacitores C1 y C2 alcamzan plena carga cuando la corriente que dejan pasar hacia las bases de los transistores alcanza la corriente de saturación (Isat). Esto sucede, de forma práctica, cuando el voltaje del capacitor alcanza aproximadamente el 50% de su voltaje máximo de carga.
Para iniciar el análisis del circuito debemos asumir condiciones iniciales, por ejemplo podemos considerar que: Q1 esta en CORTE
Q2 esta en SATURACIÓN
Si asumimos la condición al revés los resultados serán los mismos.

Funcionamiento:
a) como Q1 esta en SATURACIÓN, entonces su colector está a potencial de tierra (0v) con los cual C2 empieza a cargarse por medio de R2.
b) Como C2 empieza a cargarse a corriente máxima, no permite que le llegue corriente a la base de Q2, con lo cual Q2 permanece en CORTE.
c) Como Q2 está en CORTE, C1 no tiene un camino a través del cual empezar a cargarse, por lo que se encuentra abierto y por medio de R1 le llega toda la corriente a la base de Q1, con lo cual Q1 permanece en SATURACIÓN.
d) Cuando C2 alcanza plena carga, la corriente que le llega a la base de Q2 es tal que Q2 pasa a SATURACIÓN, en ese instante C1 inicia su carga a través de R1 y además C2 se descarga por medio de la juntura B-E de Q2 y se abre.
e) Como C1 empieza a cargarse a corriente máxima, no permite que le llegue corriente a la base de Q1, con lo cual Q1 pasa al CORTE.
f) Esta nueva condición permanecerá hasta que C1 alcance plena carga, momento en el cual la corriente que le llega a la base de Q1 hace que Q1 regrese a SATURACIÓN, iniciándose nuevamente la carga de C2 y descargándose C1 a través de la juntura B-E de Q1.
g) La secuencia se repite indefinidamente.
Como podemos apreciar en la fig.4, el periodo de la onda esta dado por la suma de los tiempos de carga de cada capacitor, debido a que la descarga se realiza en forma instantánea. Por esta razón hallaremos primero los tiempos T1 y T2.

Partiendo de la ecuación : Vc = Vmax*[1 – exp(-t/t)]
Si: t = T1, entonces , Vc = Vcc/2
Vmax = Vcc
t = R1C1
Entonces : Vcc/2 = Vcc*[1 – exp(-T1/R1C1)]
exp(-T1/R1C1) = 1 – ½ = 1/2
exp (T1/R1C1) = 2
T1/R1C1 = ln2
Por lo tanto:
T1 = ln2*R1C1 = 0,693R1C1
Como T1= T2, entonces:
T = 0,693*(R1C1 + R2C2)
Por lo tanto : f = 1,44/(R1C1 +R2C2)
Si colocamos : R1=R2=R y C1=C2=C, entonces :
T = 1,386*RC
f = 0,72/RC
Subscribe to:
Posts (Atom)
